🔌 本功課所需杜邦線
電流急急棒專案接線請依下表準備(多為公母線連接 Arduino 與麵包板;直接對照右側「收納位置」欄到收納盒取線即可)。上方為數量表,下方為接線圖。
| 顏色 | 長度 | 規格 | 數量 | 收納位置 |
|---|---|---|---|---|
| 白 | 30 cm | 公母 | 3 | C2 |
| 灰 | 30 cm | 公母 | 1 | C2 |
| 白 | 20 cm | 公母 | 1 | C2 |
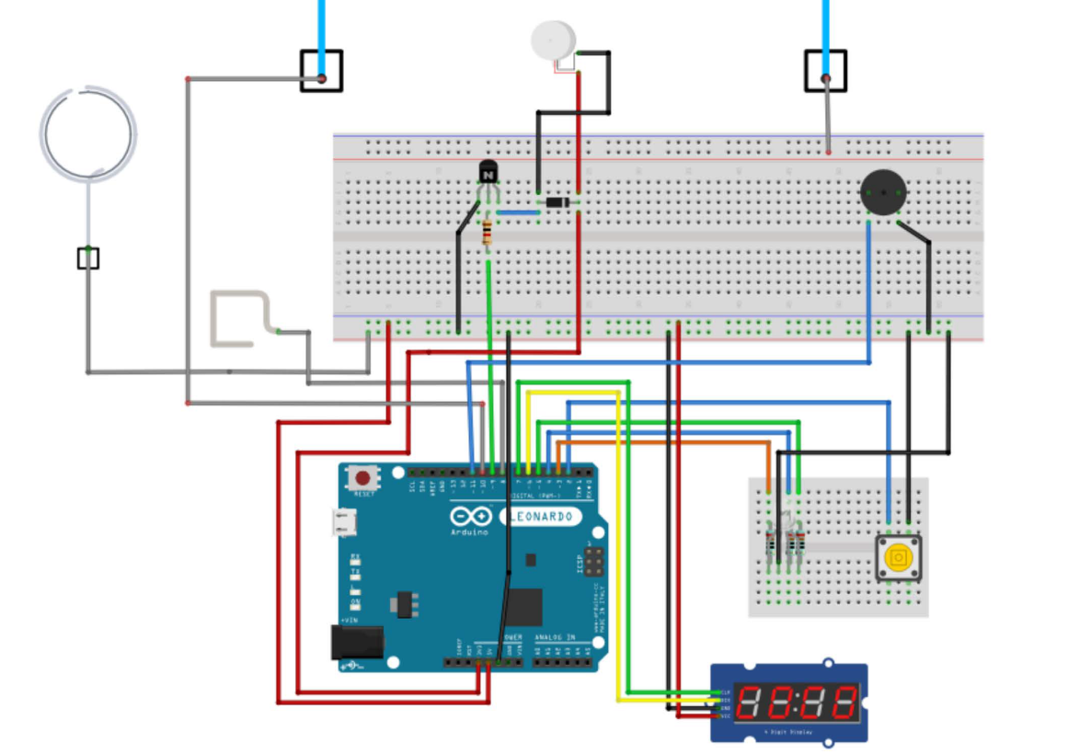
圖:功課五(電流急急棒)接線圖
🎯 遊戲挑戰
製作一個電流急急棒遊戲機!結合按鈕、RGB LED、數碼管計時器、蜂鳴器和震動馬達:
按下按鈕開始 → 計時器啟動 → 小心前進 → 碰到警報!→ 到達終點成功!
📜 遊戲規則
- 🟢 按下按鈕開始遊戲,藍燈亮起,計時開始
- ⏱️ 數碼管即時顯示經過的秒數
- 🏆 手持金屬環到達終點線(D8),綠燈亮起 → 挑戰成功!
- 💥 途中碰到障礙線(D10),紅燈亮起 + 蜂鳴器響 + 馬達震動 → 挑戰失敗!
- 🔄 隨時按下按鈕可重新開始遊戲
🔄 遊戲狀態流程
這個遊戲使用「狀態機」邏輯來控制:
IDLE 待命
等待按鈕
數碼管顯示 00:00
數碼管顯示 00:00
→
RUNNING 進行中
藍燈亮起
計時器運轉
計時器運轉
→
D8 終點
→
D10 障礙
成功!
觸碰終點線
綠燈亮起
綠燈亮起
失敗!
碰到障礙線
紅燈 + 警報
紅燈 + 警報
🔌 接線對照表
這個專案需要用到多個元件,請按照以下表格仔細接線:
| Arduino 接腳 | 連接元件 | 說明 |
|---|---|---|
| D2 | 按鈕 | 啟動 / 重新開始遊戲 |
| D3 | 紅色 LED | 碰到障礙時亮起 |
| D4 | 藍色 LED | 遊戲開始時亮起(程式碼中為 bluePin) |
| D5 | 綠色 LED | 到達終點時亮起 |
| D6 | TM1637 DIO | 數碼管資料線 |
| D7 | TM1637 CLK | 數碼管時鐘線 |
| D8 | 終點線 | 金屬環到達終點的感測 |
| D9 | 震動馬達 | 碰到障礙時震動警報 |
| D10 | 障礙線 | 金屬環碰到彎曲線的感測 |
| D11 | 蜂鳴器 | 碰到障礙時聲音警報 |
💡 急急棒製作小提示
- 障礙線:用粗鐵絲(或銅線)彎成蜿蜒的路徑,一端接 GND,另一端接 D10
- 手持環:用鐵絲彎成小圈,套在障礙線上,接 GND
- 終點線:在路徑尾端放置一小段金屬,一端接 D8
- D8 和 D10 使用
INPUT_PULLUP,平時為 HIGH,接觸(接地)時變 LOW
🤖
與ChatGPT協作
你可以試著問ChatGPT這些問題來獲得幫助:
我想用Arduino製作一個「電流急急棒」遊戲機。
功能需求:
1. 按下按鈕開始遊戲,藍燈亮起,數碼管開始計時
2. 玩家手持金屬環沿著彎曲金屬線前進
3. 碰到障礙線(D10)→ 紅燈亮起 + 蜂鳴器響 + 馬達震動 0.5秒
4. 到達終點線(D8)→ 綠燈亮起,遊戲成功
5. 數碼管即時顯示經過的秒數
6. 按鈕可隨時重新開始
硬體接線:
- 按鈕:D2(INPUT_PULLUP)
- 紅色LED:D3
- 藍色LED:D4
- 綠色LED:D5
- TM1637 DIO:D6
- TM1637 CLK:D7
- 終點線:D8(INPUT_PULLUP)
- 震動馬達:D9
- 障礙線:D10(INPUT_PULLUP)
- 蜂鳴器:D11
請幫我寫Arduino程式碼,使用狀態機設計,並加上詳細註解。
💡 提問技巧
- 說明遊戲的完整規則和流程
- 告訴AI你使用了哪些感測接腳(終點線、障礙線)
- 詢問什麼是「狀態機」以及為什麼要用它
- 如果警報不夠明顯,可以請AI加入更多提示效果
📝 程式碼詳細解說
讓我們一步步了解這個電流急急棒遊戲的程式碼!
📚 第一部分:引入函式庫與腳位定義
使用 TM1637 函式庫來控制數碼管,定義所有元件的接腳
#include <TM1637Display.h>
// 腳位定義
const int buttonPin = 2;
const int redPin = 3;
const int bluePin = 4;
const int greenPin = 5;
const int displayDIO = 6;
const int displayCLK = 7;
const int goalPin = 8; // 終點線
const int obstaclePin = 10; // 障礙線
const int motorPin = 9;
const int buzzerPin = 11;
🎮 第二部分:狀態機設計
使用 enum(列舉)定義遊戲的三種狀態,讓程式邏輯更清晰
TM1637Display display(displayCLK, displayDIO);
// 遊戲有三種狀態:待命、進行中、已停止
enum GameState { IDLE, RUNNING, STOPPED };
GameState state = IDLE;
unsigned long startTime = 0;
float elapsed = 0;
bool buttonPressed = false;
bool gameStopped = false;
🧠 什麼是狀態機?
狀態機就像一個「遊戲規則管理員」!它定義了遊戲可能的幾種狀態,以及每種狀態下該做什麼:
- IDLE(待命):什麼都不做,等待玩家按下按鈕
- RUNNING(進行中):計時器在跑,隨時偵測是否碰到障礙或到達終點
- STOPPED(已停止):遊戲結束(成功或失敗),等待重新開始
有了狀態機,程式就不會亂!比如在 IDLE 狀態時,碰到障礙線不會觸發警報。
⏱️ 第三部分:防彈跳與顯示更新
按鈕防彈跳和數碼管的更新頻率控制
// 防彈跳用
unsigned long lastButtonTime = 0;
const unsigned long debounceDelay = 50;
// 顯示更新用
unsigned long lastDisplayTime = 0;
const unsigned long displayInterval = 100; // 每 100ms 更新一次顯示
💡 為什麼需要控制顯示更新頻率?
如果每次 loop() 都更新數碼管,會產生閃爍的問題。設定每 100ms 才更新一次(每秒 10 次),既能即時顯示,又不會閃爍。這就是 millis() 計時法的好處!
⚙️ 第四部分:setup 開機設定
初始化所有接腳和元件
void setup() {
Serial.begin(9600);
pinMode(buttonPin, INPUT_PULLUP);
pinMode(redPin, OUTPUT);
pinMode(greenPin, OUTPUT);
pinMode(bluePin, OUTPUT);
pinMode(goalPin, INPUT_PULLUP); // 終點線用內建上拉電阻
pinMode(obstaclePin, INPUT_PULLUP); // 障礙線用內建上拉電阻
pinMode(motorPin, OUTPUT);
pinMode(buzzerPin, OUTPUT);
display.setBrightness(0x0f);
display.showNumberDecEx(0, 0b01000000, true);
setRGB(LOW, LOW, LOW);
digitalWrite(motorPin, LOW);
digitalWrite(buzzerPin, LOW);
Serial.println("系統啟動,等待按鈕");
}
🔑 INPUT_PULLUP 的重要性
終點線(D8)和障礙線(D10)都設為 INPUT_PULLUP:
- 平時電壓被「拉高」到 HIGH(沒碰到)
- 金屬環碰到時,接通 GND,變成 LOW(觸發!)
- 不需要外接電阻,Arduino 內建的就夠了
🔄 第五部分:loop 主迴圈
遊戲的核心邏輯都在這裡!
void loop() {
// 即時偵測 D8、D10
int goalState = digitalRead(goalPin);
int obstacleState = digitalRead(obstaclePin);
// 按鈕偵測 + 防彈跳
if (digitalRead(buttonPin) == LOW) {
if (millis() - lastButtonTime > debounceDelay) {
if (!buttonPressed) {
buttonPressed = true;
handleButtonPress();
}
lastButtonTime = millis();
}
} else {
buttonPressed = false;
}
// 遊戲進行中
if (state == RUNNING && !gameStopped) {
// 即時偵測是否觸發
if (goalState == LOW) {
gameStopped = true;
setRGB(LOW, HIGH, LOW); // 綠燈
Serial.println("終點觸發 → 遊戲成功");
}
if (obstacleState == LOW) {
gameStopped = true;
setRGB(HIGH, LOW, LOW); // 紅燈
Serial.println("碰到障礙 → 遊戲失敗");
triggerAlarm();
}
// 每 100ms 更新一次顯示
if (millis() - lastDisplayTime >= displayInterval) {
elapsed = (millis() - startTime) / 1000.0;
int displayValue = (int)(elapsed + 0.05);
display.showNumberDecEx(displayValue, 0b01000000, true);
lastDisplayTime = millis();
}
}
if (state == IDLE) {
display.showNumberDecEx(0, 0b01000000, true);
}
}
⚠️ 為什麼不用 delay()?
在這個遊戲中,我們不能用 delay() 來計時!因為:
delay()會讓 Arduino「暫停」,暫停期間無法偵測金屬環碰到障礙- 使用
millis()可以在計時的同時持續偵測所有感測器 - 這叫做「非阻塞式程式設計」,是遊戲開發的基本技巧!
🎮 第六部分:按鈕處理函式
按下按鈕時重置所有狀態,開始新一局
void handleButtonPress() {
state = RUNNING;
gameStopped = false;
startTime = millis();
elapsed = 0;
setRGB(LOW, LOW, HIGH); // 藍燈亮起
digitalWrite(motorPin, LOW);
digitalWrite(buzzerPin, LOW);
Serial.println("遊戲開始,計時中...");
}
💡 第七部分:輔助函式
RGB 燈控制與警報觸發
// --- 控制RGB燈 ---
void setRGB(bool r, bool g, bool b) {
digitalWrite(redPin, r);
digitalWrite(greenPin, g);
digitalWrite(bluePin, b);
}
// --- 警報觸發(馬達 + 蜂鳴器 0.5秒)---
void triggerAlarm() {
digitalWrite(motorPin, HIGH);
digitalWrite(buzzerPin, HIGH);
delay(500);
digitalWrite(motorPin, LOW);
digitalWrite(buzzerPin, LOW);
Serial.println("警報觸發 (馬達 + 蜂鳴器 0.5秒)");
}
🔔 triggerAlarm 的設計考量
這裡用了 delay(500),因為遊戲已經結束(gameStopped = true),不需要再偵測感測器了。0.5 秒的警報既能讓玩家明確感受到「碰到了!」,又不會太長讓人不耐煩。
📋 完整程式碼
點擊展開完整程式碼
#include <TM1637Display.h>
// 腳位定義
const int buttonPin = 2;
const int redPin = 3;
const int bluePin = 4;
const int greenPin = 5;
const int displayDIO = 6;
const int displayCLK = 7;
const int goalPin = 8; // 終點線
const int obstaclePin = 10; // 障礙線
const int motorPin = 9;
const int buzzerPin = 11;
TM1637Display display(displayCLK, displayDIO);
enum GameState { IDLE, RUNNING, STOPPED };
GameState state = IDLE;
unsigned long startTime = 0;
float elapsed = 0;
bool buttonPressed = false;
bool gameStopped = false;
// 防彈跳用
unsigned long lastButtonTime = 0;
const unsigned long debounceDelay = 50;
// 顯示更新用
unsigned long lastDisplayTime = 0;
const unsigned long displayInterval = 100;
void setup() {
Serial.begin(9600);
pinMode(buttonPin, INPUT_PULLUP);
pinMode(redPin, OUTPUT);
pinMode(greenPin, OUTPUT);
pinMode(bluePin, OUTPUT);
pinMode(goalPin, INPUT_PULLUP);
pinMode(obstaclePin, INPUT_PULLUP);
pinMode(motorPin, OUTPUT);
pinMode(buzzerPin, OUTPUT);
display.setBrightness(0x0f);
display.showNumberDecEx(0, 0b01000000, true);
setRGB(LOW, LOW, LOW);
digitalWrite(motorPin, LOW);
digitalWrite(buzzerPin, LOW);
Serial.println("系統啟動,等待按鈕");
}
void loop() {
int goalState = digitalRead(goalPin);
int obstacleState = digitalRead(obstaclePin);
if (digitalRead(buttonPin) == LOW) {
if (millis() - lastButtonTime > debounceDelay) {
if (!buttonPressed) {
buttonPressed = true;
handleButtonPress();
}
lastButtonTime = millis();
}
} else {
buttonPressed = false;
}
if (state == RUNNING && !gameStopped) {
if (goalState == LOW) {
gameStopped = true;
setRGB(LOW, HIGH, LOW);
Serial.println("終點觸發 → 遊戲成功");
}
if (obstacleState == LOW) {
gameStopped = true;
setRGB(HIGH, LOW, LOW);
Serial.println("碰到障礙 → 遊戲失敗");
triggerAlarm();
}
if (millis() - lastDisplayTime >= displayInterval) {
elapsed = (millis() - startTime) / 1000.0;
int displayValue = (int)(elapsed + 0.05);
display.showNumberDecEx(displayValue, 0b01000000, true);
lastDisplayTime = millis();
}
}
if (state == IDLE) {
display.showNumberDecEx(0, 0b01000000, true);
}
}
void handleButtonPress() {
state = RUNNING;
gameStopped = false;
startTime = millis();
elapsed = 0;
setRGB(LOW, LOW, HIGH);
digitalWrite(motorPin, LOW);
digitalWrite(buzzerPin, LOW);
Serial.println("遊戲開始,計時中...");
}
void setRGB(bool r, bool g, bool b) {
digitalWrite(redPin, r);
digitalWrite(greenPin, g);
digitalWrite(bluePin, b);
}
void triggerAlarm() {
digitalWrite(motorPin, HIGH);
digitalWrite(buzzerPin, HIGH);
delay(500);
digitalWrite(motorPin, LOW);
digitalWrite(buzzerPin, LOW);
Serial.println("警報觸發 (馬達 + 蜂鳴器 0.5秒)");
}
🎉 功課五學習重點
完成電流急急棒後,你學會了:
- ✅ 狀態機設計:用 enum 管理遊戲的不同階段
- ✅ 非阻塞計時:用 millis() 取代 delay(),即時偵測感測器
- ✅ 防彈跳處理:用時間差過濾按鈕雜訊
- ✅ 多感測器即時偵測:同時監控終點線和障礙線
- ✅ 多元件警報系統:蜂鳴器 + 震動馬達的組合回饋
- ✅ 計時器顯示:數碼管即時更新經過秒數
🎓 到目前為止你完成的學習路程:
- ✅ Arduino IDE 安裝與使用
- ✅ 接腳原理與電路基礎
- ✅ 功課一:RGB LED 顏色控制
- ✅ 功課二:數碼管顯示與倒數
- ✅ 功課三:蜂鳴器音效控制
- ✅ 功課四:震動馬達與完整整合
- ✅ 功課五:電流急急棒遊戲(狀態機 + 即時偵測)